360度整合營銷 新商業(yè)環(huán)境下企業(yè)品牌傳播與管理的核心策略
在信息爆炸、媒介碎片化、消費(fèi)者注意力稀缺的當(dāng)下,企業(yè)品牌傳播正面臨前所未有的復(fù)雜挑戰(zhàn)。傳統(tǒng)的單一渠道、單向灌輸?shù)臓I銷模式已難以為繼。要在這個(gè)時(shí)代建立持久的品牌影響力、與消費(fèi)者建立深度連接,貫徹360度整合營銷策略,并將其作為品牌管理的核心框架,已不再是一種選擇,而是一種必然。
一、何為360度整合營銷:超越廣告的全面觸達(dá)
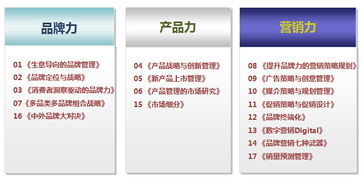
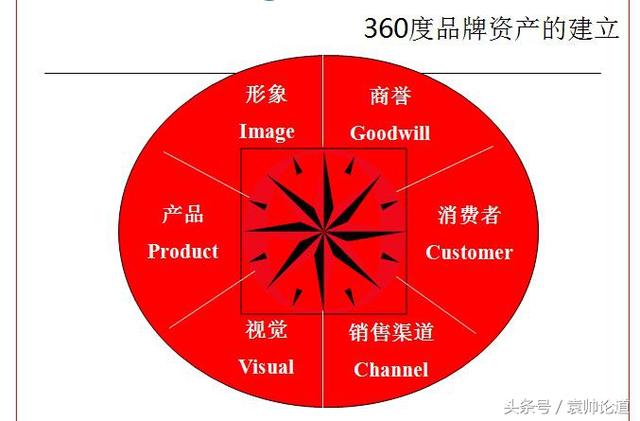
360度整合營銷并非簡單的“多點(diǎn)投放”,而是一種系統(tǒng)性的戰(zhàn)略思維。它要求企業(yè)以品牌核心價(jià)值為圓心,將所有與消費(fèi)者接觸的觸點(diǎn)——從市場調(diào)研、產(chǎn)品設(shè)計(jì)、廣告公關(guān)、社交媒體、銷售終端、客戶服務(wù),乃至員工行為和企業(yè)社會(huì)責(zé)任——進(jìn)行全方位、一致性的規(guī)劃與整合。其目標(biāo)是確保消費(fèi)者在任何時(shí)間、任何場景、通過任何渠道接觸品牌時(shí),都能獲得統(tǒng)一、連貫且富有吸引力的體驗(yàn),從而在消費(fèi)者心智中構(gòu)建一個(gè)清晰、完整且積極的品牌形象。
二、整合營銷與品牌管理的深度融合
品牌管理是一個(gè)長期、動(dòng)態(tài)的系統(tǒng)工程,而整合營銷正是實(shí)現(xiàn)品牌管理目標(biāo)的關(guān)鍵執(zhí)行路徑。兩者的深度融合體現(xiàn)在:
- 戰(zhàn)略協(xié)同: 品牌定位與核心信息是整合營銷的“指揮棒”。所有營銷活動(dòng),無論是線上廣告、線下活動(dòng)還是內(nèi)容共創(chuàng),都必須嚴(yán)格遵循并強(qiáng)化這一定位,確保“一個(gè)聲音,一個(gè)形象”,避免品牌信息混亂。
- 數(shù)據(jù)驅(qū)動(dòng): 整合營銷的各個(gè)觸點(diǎn)產(chǎn)生了海量的用戶行為數(shù)據(jù)。通過數(shù)據(jù)分析,品牌管理者可以更精準(zhǔn)地洞察消費(fèi)者需求、評估傳播效果、優(yōu)化觸點(diǎn)體驗(yàn),實(shí)現(xiàn)從“經(jīng)驗(yàn)決策”到“數(shù)據(jù)決策”的升級,讓品牌管理更加科學(xué)、敏捷。
- 體驗(yàn)閉環(huán): 整合營銷關(guān)注消費(fèi)者從認(rèn)知、興趣、購買到忠誠的全旅程。品牌管理則負(fù)責(zé)在這一旅程的每個(gè)環(huán)節(jié),通過整合的營銷手段,設(shè)計(jì)并交付超越預(yù)期的品牌體驗(yàn),將單次交易轉(zhuǎn)化為長期關(guān)系,提升品牌資產(chǎn)。
三、貫徹360度整合營銷策略的關(guān)鍵舉措
- 建立以客戶為中心的跨部門協(xié)同機(jī)制: 打破市場、銷售、產(chǎn)品、客服等部門壁壘,成立虛擬或?qū)嶓w的品牌整合營銷團(tuán)隊(duì),統(tǒng)一目標(biāo),共享數(shù)據(jù),協(xié)同作戰(zhàn),確保消費(fèi)者體驗(yàn)的流暢性與一致性。
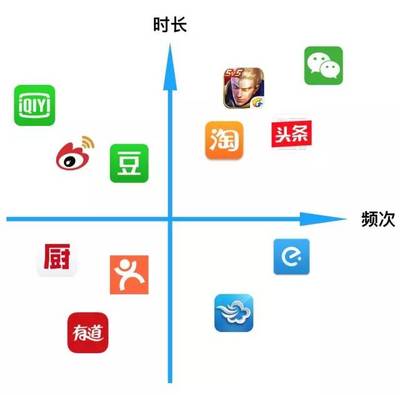
- 打造“內(nèi)容+渠道”的立體傳播矩陣: 創(chuàng)造高質(zhì)量、有價(jià)值、符合品牌調(diào)性的核心內(nèi)容(故事、視頻、白皮書等),并依據(jù)不同渠道(社交媒體、搜索引擎、行業(yè)KOL、線下活動(dòng)等)的特性進(jìn)行適配和分發(fā),實(shí)現(xiàn)內(nèi)容價(jià)值的最大化。
- 擁抱技術(shù),實(shí)現(xiàn)智能化運(yùn)營: 利用營銷自動(dòng)化工具、客戶數(shù)據(jù)平臺(CDP)、人工智能等技術(shù),實(shí)現(xiàn)用戶畫像構(gòu)建、個(gè)性化溝通、效果實(shí)時(shí)追蹤與優(yōu)化,提升整合營銷的效率和精準(zhǔn)度。
- 量化評估,動(dòng)態(tài)優(yōu)化: 建立涵蓋品牌知名度、美譽(yù)度、考慮度、忠誠度以及商業(yè)轉(zhuǎn)化等多維度的評估體系。不僅要看短期的點(diǎn)擊率和銷售額,更要關(guān)注長期的品牌健康度和顧客終身價(jià)值,并據(jù)此持續(xù)調(diào)整營銷策略。
四、挑戰(zhàn)與未來展望
貫徹360度整合營銷策略并非易事,它需要持續(xù)的投入、組織文化的變革以及對失敗的高度容忍。企業(yè)常面臨的挑戰(zhàn)包括:數(shù)據(jù)孤島、部門利益沖突、快速變化的媒介環(huán)境以及衡量長期品牌效果的困難。
隨著元宇宙、Web3.0、人工智能等新技術(shù)的興起,品牌的觸點(diǎn)將更加多元和沉浸。360度整合營銷的內(nèi)涵也將不斷擴(kuò)展,要求品牌在虛擬與現(xiàn)實(shí)交織的世界中,依然能提供無縫、可信且有意義的體驗(yàn)。那些能夠?qū)⒄蠣I銷思維深度融入品牌血液,以敏捷、真誠和創(chuàng)新的方式與消費(fèi)者對話的企業(yè),必將在激烈的市場競爭中構(gòu)建起難以撼動(dòng)的品牌護(hù)城河。
在當(dāng)下的商業(yè)環(huán)境中,品牌傳播與管理已是一體兩面。唯有堅(jiān)定不移地貫徹360度整合營銷策略,將每一次與消費(fèi)者的接觸都視為塑造品牌的重要機(jī)會(huì),企業(yè)才能穿越噪音,贏得心智,實(shí)現(xiàn)可持續(xù)的增長。
如若轉(zhuǎn)載,請注明出處:http://www.dl12580.cn/product/8.html
更新時(shí)間:2026-06-11 06:39:20